脉冲信号与转速的关系
脉冲信号适合数字电路,用于电机的控制信号或发动机转速数据等。下面介绍脉冲信号的特点与以电机为例的特性差异。

用于掌握及控制电机旋转的脉冲
脉冲的典型用法大致分为两种。一种是根据输入的脉冲采集速度、距离等;另一种是通过输出脉冲,控制电机、变频器等系统。与此双方都有关系的是“旋转”因素。

利用脉冲的转速采集
利用脉冲采集电机等的转速的主要方法有“频闪观测仪采集”、“转速表采集”、“光学设备采集”等。
频闪观测仪采集
以一定间隔重复发出瞬时亮灯光的装置称为频闪观测仪。利用频闪观测仪以相等间隔对旋转体照射光源时,若闪烁周期与旋转周期相同,则在普通的目视下难以捕捉的高速旋转体犹如处于静止状态。频闪观测仪法是利用此现象获取转速的方法,除用于采集发动机及电机的转速以外,还用于检查旋转体的划伤或缺损等。
转速表采集
用于采集发动机或电机转速的转速表分为以机械方式读取转速的机械式转速表与以电气方式读取转速的电气式转速表,目前大多数汽车都采用电气式转速表。电气式转速表通过对点火线圈的点火脉冲进行计数来获取转速。主要用于实时掌握汽车或摩托车的发动机转速。

光学设备采集
利用发光二极管向具有细小狭缝或孔的转盘照射红外光,使从狭缝或孔射入的光通过光电二极管,从而将机械性旋转位移转换为脉冲信号以获取转速的方法。除汽车、航空航天领域外,还用于能源领域。

利用脉冲的电机
利用脉冲信号控制驱动的典型系统有步进电机(脉冲电机)或伺服电机等电机类。
步进电机
与接收的电脉冲信号同步运行的电机。通过脉冲数与频率进行旋转角度及速度等旋转控制。其原理为输入1个脉冲时旋转的轴角度(基本步进角)为固定,每当有脉冲输入就仅旋转事先规定的角度。标准的5相步进电机时,基本步进角为0.72°,输入125个脉冲则旋转90°,500个脉冲时旋转360°。步进电机的旋转量与脉冲信号数量成正比,旋转速度与频率成正比。

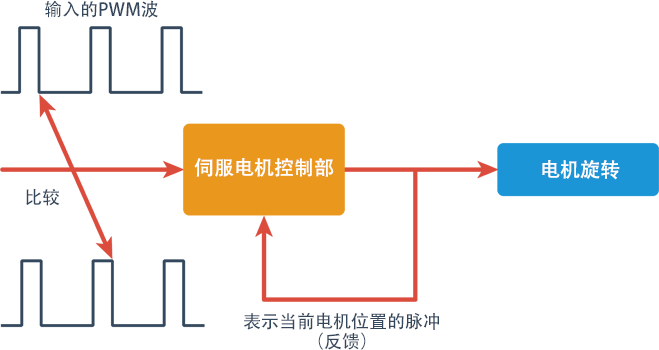
伺服电机
利用以目标物的位置或方向等作为控制量运行的自动控制装置“伺服机构”的电机。具有步进电机中所没有的旋转检测仪,在检测旋转角度或旋转速度的同时向驱动器进行反馈,并对旋转轴的当前位置与目标位置进行比较后经过运行使其差分变为“0”。因此,停止精度非常高,常用于机床或工业机器人等。
特性差异
| 步进电机 | 伺服电机 | |
|---|---|---|
| 优点 |
|
|
| 缺点 |
|
|

