光栅的安装与安全距离
安装安全光栅或其他电气检测保护装置时,请参照人体进入检测区域之时及到达危险区域之前,
机器停止所需的最小距离。ISO 13855 等标准对这些距离进行了定义。
安装光栅时,务必提供相应依据(如使用光栅的国家或地区的标准、法规和法律)确定的安全距离
(最小距离)。
按照ISO 13855 标准计算安全距离
安全距离(S)= 人体接近速度 × 响应时间 + 附加距离(该距离随传感器的检测能力的不同而变化)
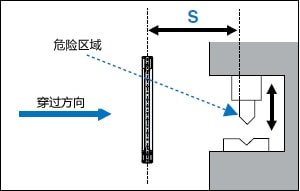
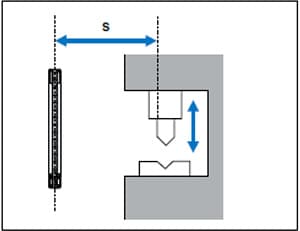
与接近方向垂直的方向
机器停止所需的最长时间与安全距离之间的关系
公式中的T 值由下面两个参数构成。
T = 机器停止所需的最长时间 + 光栅响应时间(ON OFF)
当K(穿过速度) = 2000 mm/s 时
例如,使用GL-R08H 光栅(其响应时间为0.0069 s)时
S = 2000 mm/s ×( 机器停止所需的最长时间 + 0.0069 s) + C
如上文所示,将机器停止所需的最长时间乘以穿过速度(2000 mm/s),因此,即使机器停止所需的最长时间只增加1 秒,
安全距离也会增加(2000 mm/s × 1 s = 2000 mm)。
光栅响应时间每增加1 ms,安全距离会相应增加2 mm。
基本计算示例
与接近方向垂直的方向: GL-R 系列
- 计算示例 (1)-1
使用GL-R60H
(检测能力d = 25 mm 且光轴数为60)时
- 条件: 工业应用
K = 2000 mm/s
t1(GL-R60H 响应时间) = 0.0157 s
t2(机器停止所需的最长时间) = 0.1 s
C = 8 × (25 - 14) = 88 mm
S = K × T + C = 2000 ×(0.1157)+ 88 = 319.4mm
如果S 大于500 mm,则以K 值等于1600 mm/s 再次进行计算。
如果再次计算得出的S 值小于或等于500,则应将S 值设置为500。
- 计算示例 (1)-2
使用GL-R08L
(检测能力d = 45 mm 且光轴数为8)时
- 条件:工业应用
K = 1600 mm/s
t1(GL-R08L 响应时间) = 0.0069 s
t2(机器停止所需的最长时间) = 0.1 s
C = 850 mm
S = K × T + C = 1600 × (0.1069) + 850 = 1021.04 mm
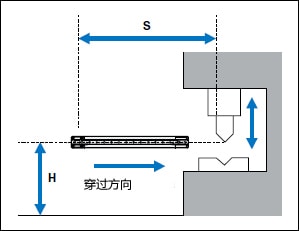
与接近方向平行的方向: GL-R 系列
- 计算示例 (2)-1
使用GL-R30L
(检测能力d = 45 mm 且光轴数为30)时
- 条件: 工业应用
K = 1600 mm/s
t1(GL-R30L 响应时间) = 0.0105 s
t2(机器停止所需的最长时间) = 0.1 s
H = 200 mm
C = 1200 - 0.4 × 200 = 1120 mm
S = K × T + C = 1600 × (0.0105 + 0.1) + 1120 mm = 1296.8 mm
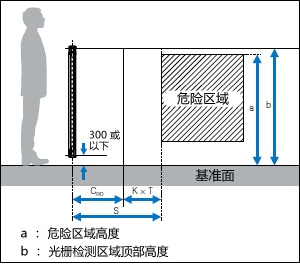
通过绕过检测区域顶部来接近危险: GL-R 系列
如果无法防止人们越过检测区域顶部来接近危险区域,则在确定
光栅高度和最小距离S 时就必须要考虑该情况。您必须将根据
下表算出的S 值与根据“与接近方向垂直的方向: GL-R 系列”
算出的S 值进行比较,并取两者较大的值设为最小距离S。
根据a 值(危险区域高度)和b 值(光栅检测区域顶部高度)确定CRO,如下表所示。

*1 不包括检测区域顶部低于900 mm 的情况,因为在这种情况下,无法采取充分的保护措施来避免规避和跨越行为。
*2 如果检测区域底部距离基准面的高度超过300 mm,则无法采取充分的保护措施来防止人员从检测区域下方通过并接近危险。
- 计算示例 (3)-1
使用GL-R60H
(检测能力d = 25 mm,光轴数为60,检测高度为1180 mm)时
- 条件: 工业应用
a(危险区域高度)= 1400 mm
b(光栅检测区域顶部高度)= 1180 + 300 = 1480 mm
-
- 根据上表中给出的数据, CRO 为850 mm。

(由于b 值为1480 mm,介于1400 和1600 之间,在这种情况下,b 值取1400。)
- K = 1600 mm/s
- t1(GL-R60H 响应时间) = 0.0157 s
- t2(机器停止所需的最长时间) = 0.1 s
- S = K × T + CRO = 1600 × (0.1157) + 850 = 1035.12 mm
(该值大于按照“与接近方向垂直的方向:GL-R 系列” 算出的S 值)
- 计算示例 (3)-2
使用GL-R80H
(检测能力d = 25 mm,光轴数为80,检测高度为1580 mm)时
- 条件: 工业应用
a(危险区域高度)= 1400 mm
b(光栅检测区域顶部高度)= 1580 + 300 = 1880 mm

- 根据上表中给出的数据, CRO 为 0 mm".
(由于b 值为1880 mm,介于1800 和2000 之间,在这种情况下,b 值取1800。)
- K = 2000 mm/s
- t1(GL-R80H 响应时间)= 0.0192 s
- t2(机器停止所需的最长时间) = 0.1 s
- S = K × T + CRO = 2000 × (0.1192) + 0 = 238.4 mm
(该值小于按照“与接近方向垂直的方向:GL-R 系列” 算出的S值)